【UUV Simulator完整安装教程(含ubuntu20.04+ROS Noetic+gazebo11的下载安装教程)】
水下世界仿真系列文章目录
第一章 水下世界仿真之UUV Simulator 安装
文章目录
- 水下世界仿真系列文章目录
- 前言
- 一、下载并安装虚拟机
- 二、在虚拟机中安装ubuntu20.04
- 2.1 下载ubuntu20.04
- 2.2 安装ubuntu-20.04
- 三、在ubuntu20.04中安装ROS Noetic + gazebo11
- 3.1 安装ROS Noetic
- 3.2 安装gazebo11
- 四、安装uuv simulator
- 总结
前言
水下世界仿真技术随着人类对海洋的不断探索变得越来越重要,本系列文章就围绕这项技术展开。本文介绍的是水下世界仿真经典软件-UUV Simulator的安装,为后续探索打下基础。
注意:
- 安装UUV Simulator需要注意版本匹配,本文采用的是ubuntu20.04+ROS Noetic+gazebo11。更高的ubuntu和ROS版本可能并不兼容uuv simulator。
关于ROS与操作系统对应关系可参考[ROS 系列学习教程] ROS与操作系统版本对应关系。 - 虚拟机对电脑性能有一定要求,我现在用的电脑配置是12th Gen Intel® Core™ i7-12700,2100 Mhz,12 个内核,20 个逻辑处理器,用起来还行。之前用MacBook Air (13-inch, 2017)就带不动。
下面开始介绍UUV Simulator的安装步骤:
一、下载并安装虚拟机
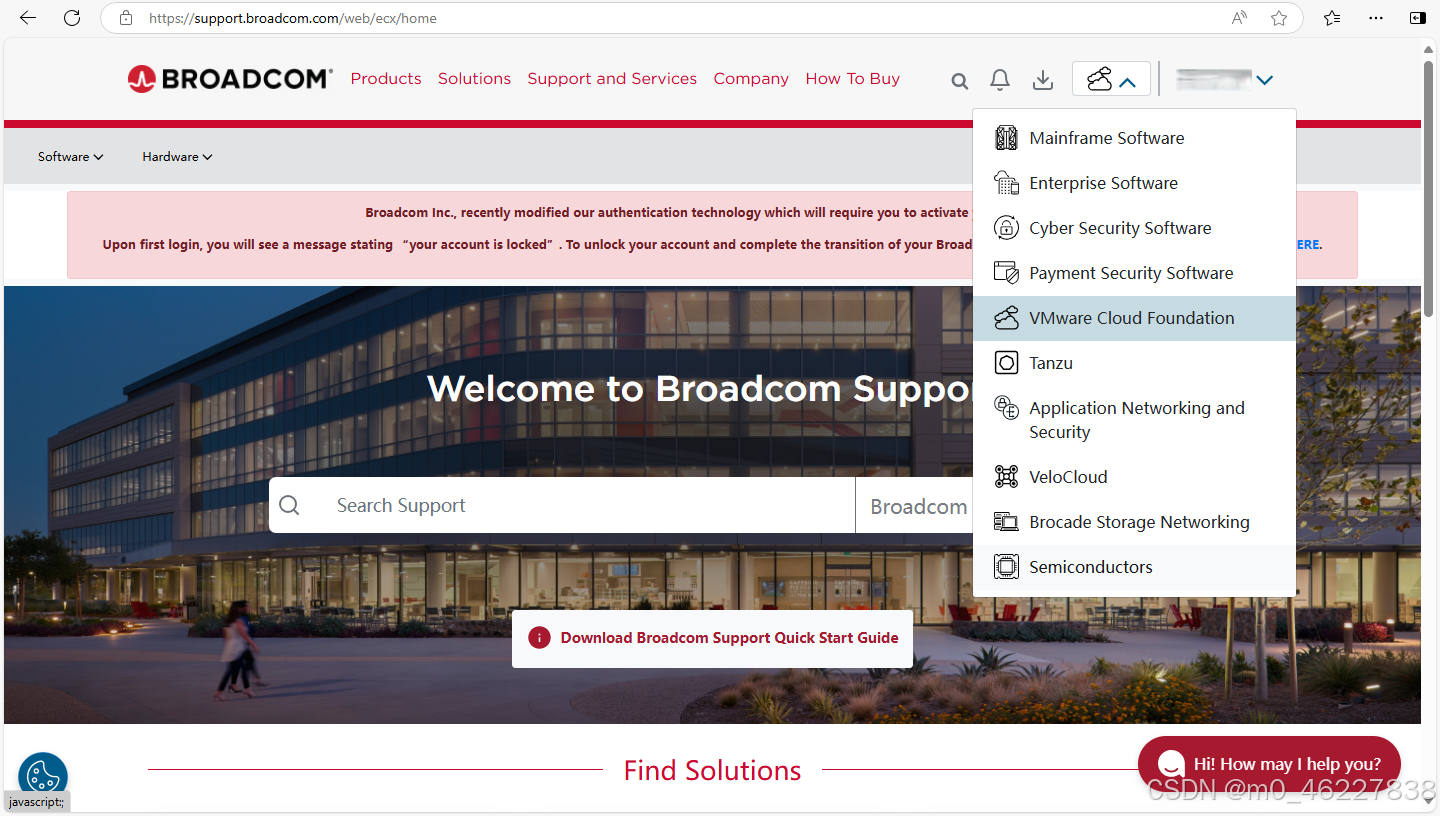
- 注册并登录博登官网
- 点击右上角的云朵,在下拉列表中选择VMware Cloud Foundation
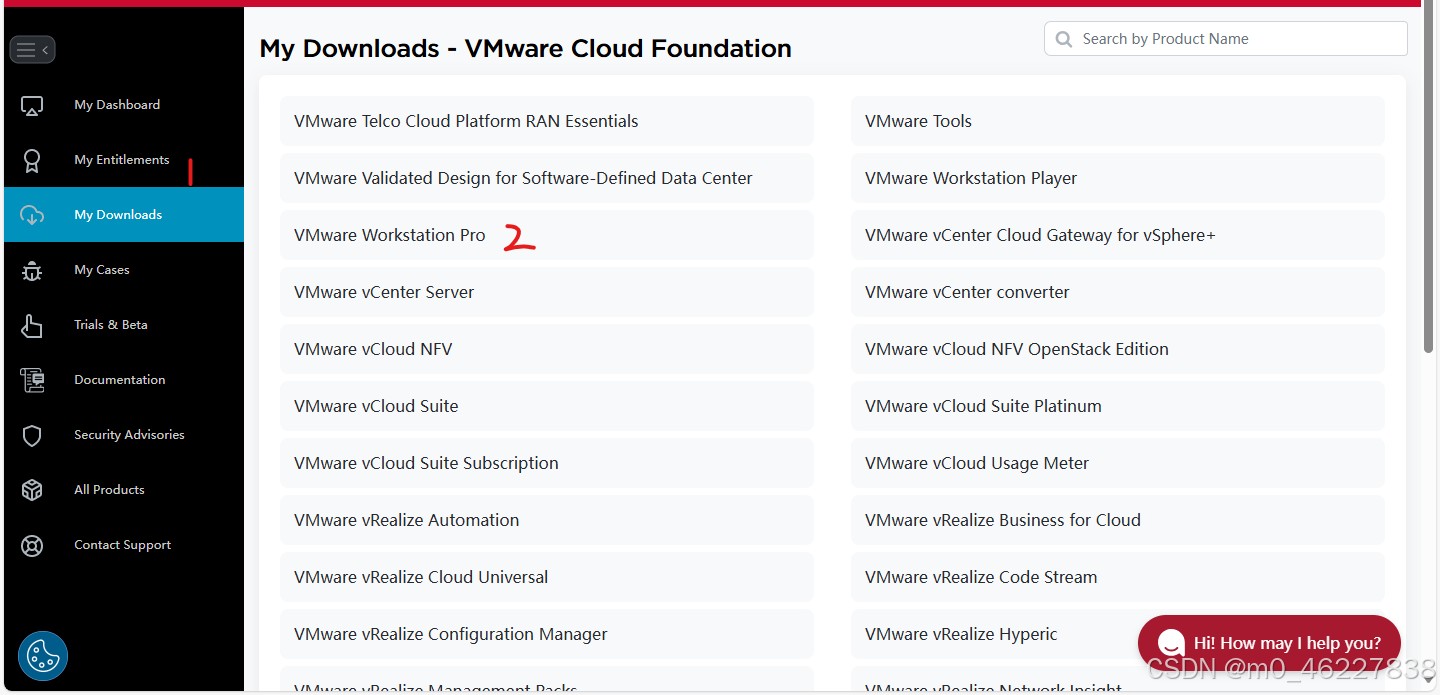
- 在新的界面点击“My DownLoads”,页面加载完成后再点击右下角的“2”进入第二页,在第二页有“VMware Workstation Pro”,点击进入
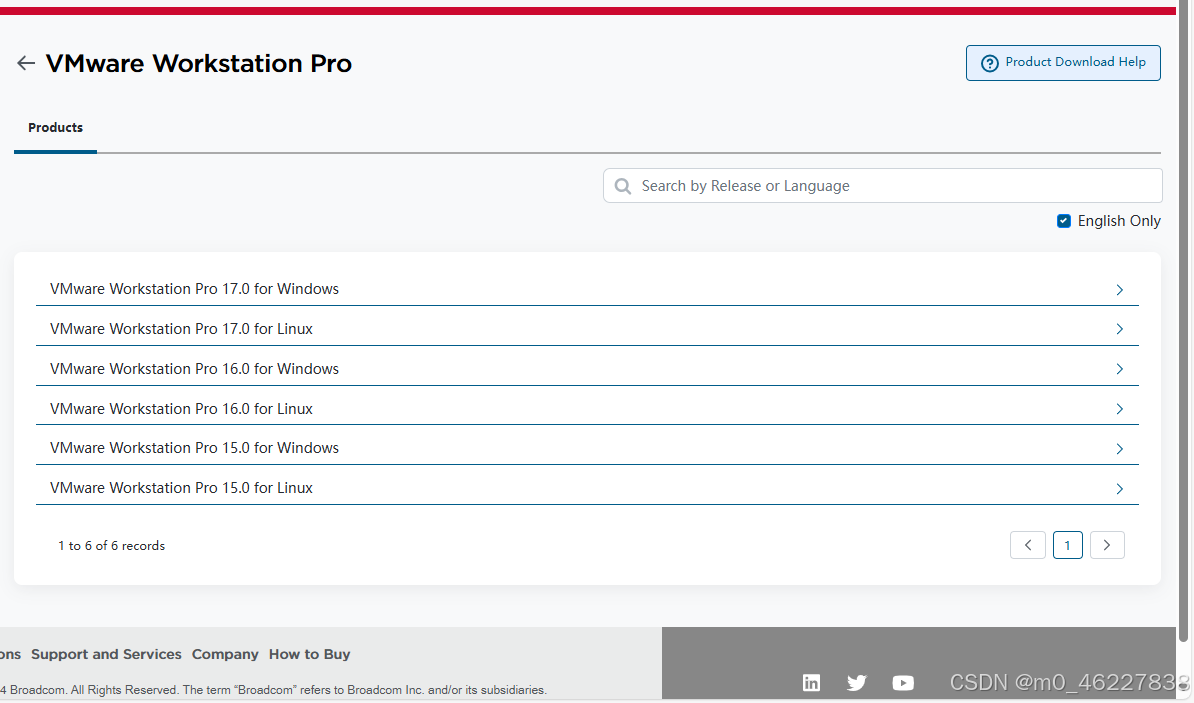
- 点击VMware Workstation Pro 17.0 for Windows(这个版本是免费的)
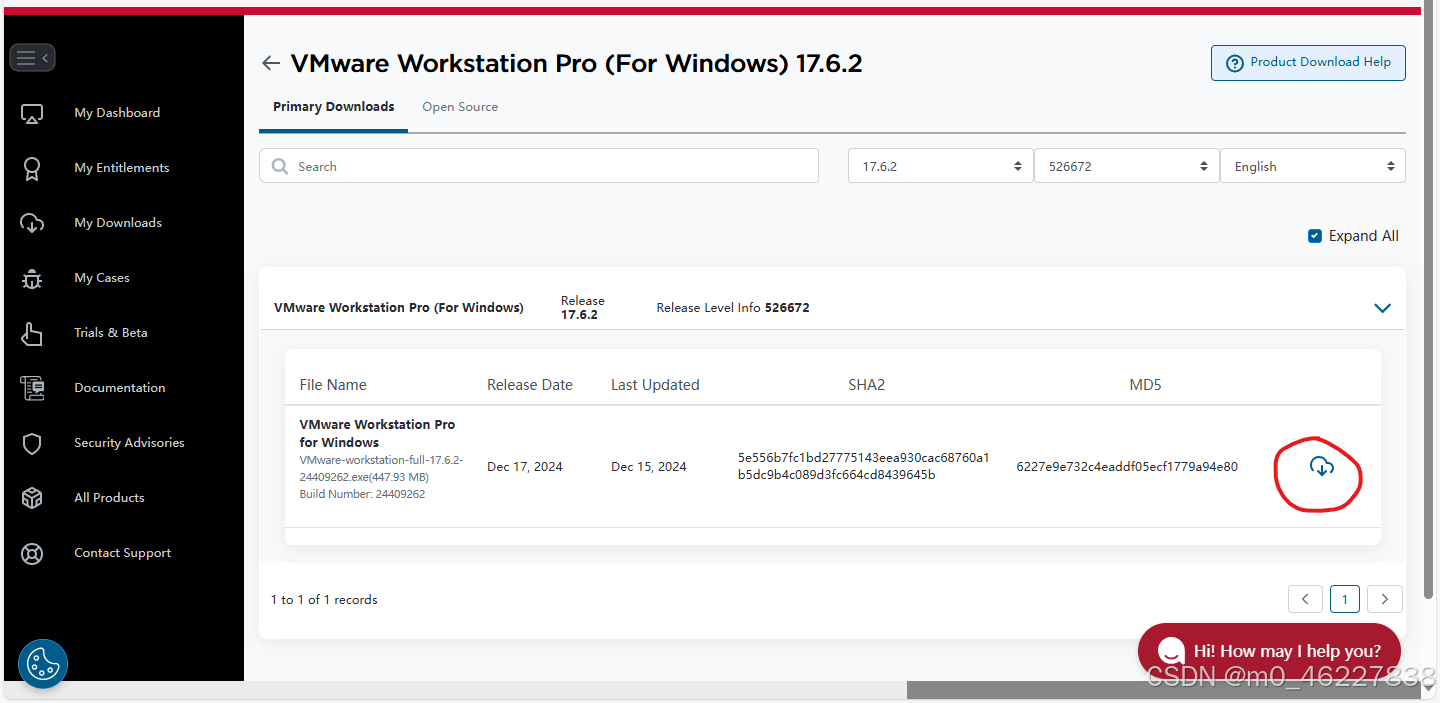
- 可以选择最新版本。下图显示的最新版本是17.6.2,点击进入
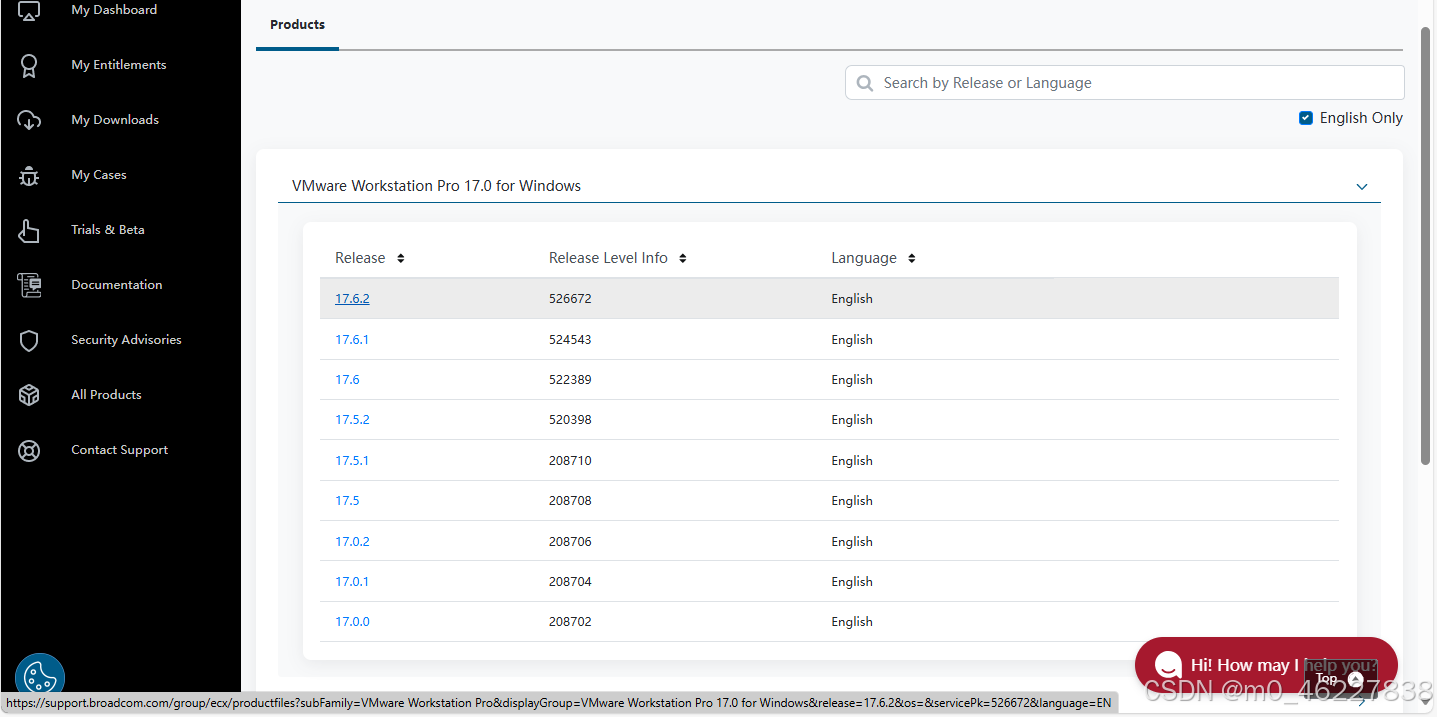
- 点击右侧的下载按钮即可下载。
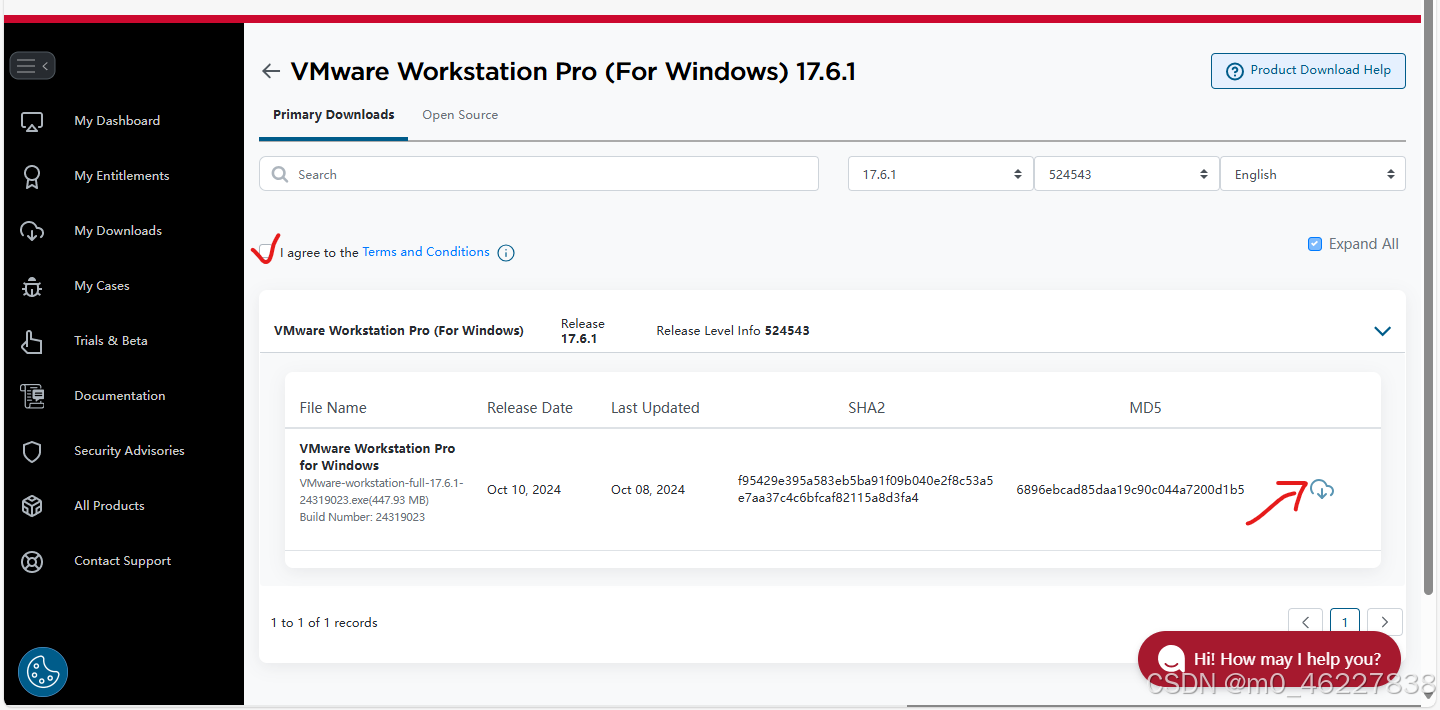
新用户需要先点击左侧的“I agree to the Terms and Conditions”,在弹窗中点击yes跳转到完善个人信息的界面,填好个人信息,提交,之后跳转回下载页面,再点击右侧下载按钮。
8.下载完成后双击下载后的文件,按照提示一直选下一步就行。安装过程中按需更改安装路径。如果弹出以下窗口,选择“将VMware Workstation 17 用于个人用途”。

说个题外话,博登公司也有针对mac系统的免费版虚拟机VMware Fusion。但这个免费版要求macOS系统必须是13以上的版本。而从12到13就必须更换硬件,无法只通过软件进行升级,也就是说必须买新的苹果电脑。不止是VMware Fusion,很多常用软件现在也只能在macOS 13以上版本运行。感觉这是苹果公司迫使老用户定期买新电脑的一种手段,不断升级硬件,让用户不断更换硬件才能用相应的软件。
二、在虚拟机中安装ubuntu20.04
2.1 下载ubuntu20.04
在Ubuntu官网下载ubuntu-20.04.6-desktop-amd64.iso:
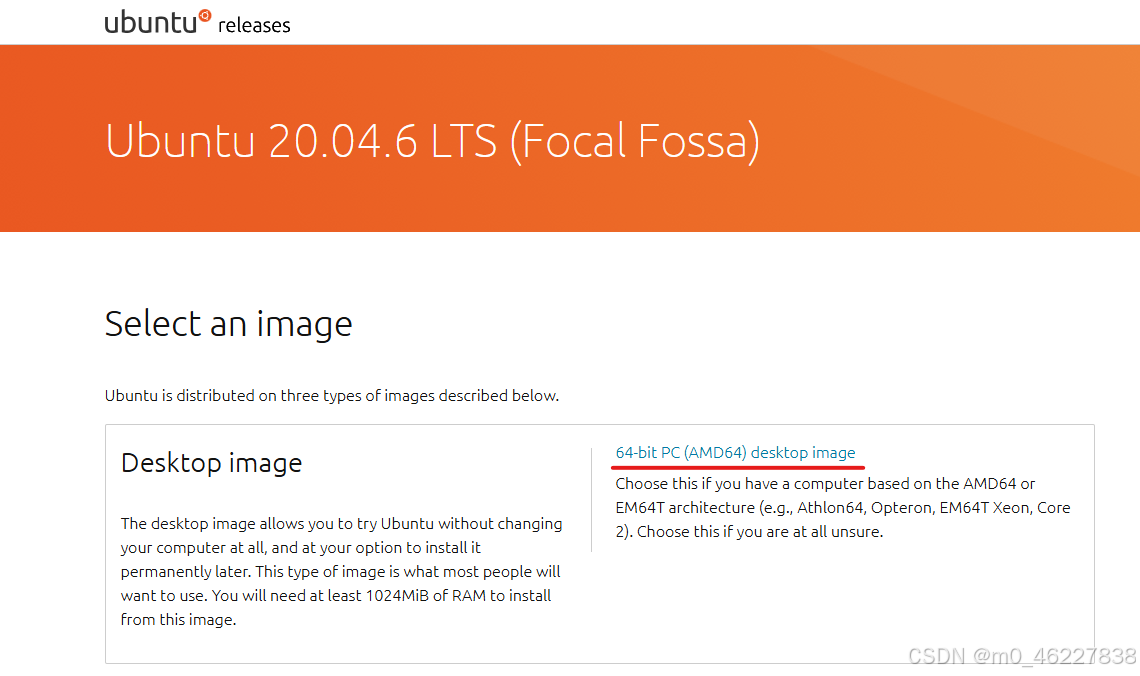
点击64-bit PC (AMD64) desktop image即可下载。
2.2 安装ubuntu-20.04
参考教程:VMware虚拟机下安装Ubuntu20.04(保姆级教程),亲测有效。
需要注意如下两点:
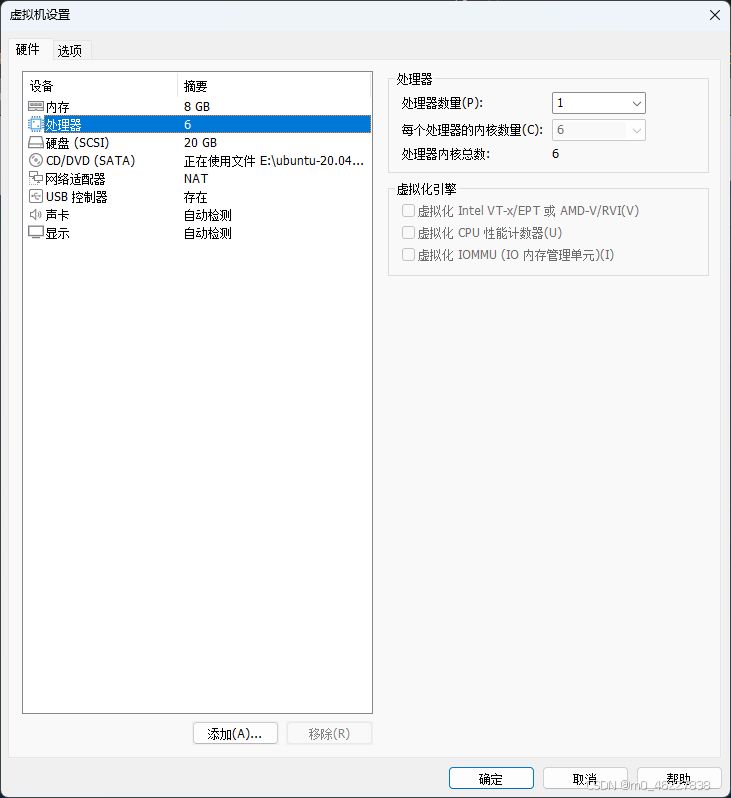
1. 虚拟机内存最好设置为8G或以上,否则运行UUV SImulator时可能会因内存不够报错!
2. 处理器配置我选择的是1个处理器+6个内核。选择依据为尽可能多但最好不要超过电脑内核总数的一半。我电脑内核总数为20,分6个给虚拟机。
三、在ubuntu20.04中安装ROS Noetic + gazebo11
3.1 安装ROS Noetic
参考教程:详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)
非常详细的教程,包括怎样更换软件源提高下载速度!中途可能出现的报错作者也都给出了相应的解决方案,大家按照教程一步一步来就行!
3.2 安装gazebo11
参考教程:Gazebo学习(一)Ubuntu20.04安装ROS+gazebo11+模型库导入(汇总跳转连接+个人安装记录)的第二步:
1、设置你的电脑来接收软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2、设置密钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
3、安装gazebo
sudo apt-get update
sudo apt-get install gazebo11
sudo apt-get install libgazebo11-dev
4、检查安装
gazebo
5、打开/.gazebo文件夹
由于文件夹是隐藏状态,打开主文件夹按“ Ctrl + H ”可以显示隐藏文件夹,双击进入.gazebo文件夹

6、下载模型
在.gazebo文件夹中点鼠标右键,选择在终端打开,输入如下指令:
git clone https://github.com/osrf/gazebo_models
7、再输入如下指令将模型加载到gazebo里
sudo cp -r ~/.gazebo/gazebo_models/* /usr/share/gazebo-11/models
然后就可以在gazebo的Insert处看到自己导入的模型了
四、安装uuv simulator
完成上述步骤后,就可以安装uuv simulator了。
主要参考教程:
(1)Ubuntu20.04 Gazebo-下载uuv_simulator,并启动水下(世界环境)机器人——僵尸水族馆tiny版
(2)uuv simulator 安装
安装步骤如下:
1、在主文件夹中创建ROS工作区并编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_make
2、下载UUV Simulator
cd ~/catkin_ws/src
git clone --branch noetic https://github.com/arturmiller/uuv_simulator.git
3、安装依赖
cd ~/catkin_ws
rosdep install --from-paths src --ignore-src -r -y
4、source然后编译
source /opt/ros/noetic/setup.bash
cd ~/catkin_ws
catkin_make
5、更新~/.bashrc文件
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
6、安装完毕,接下来输入命令进行测试
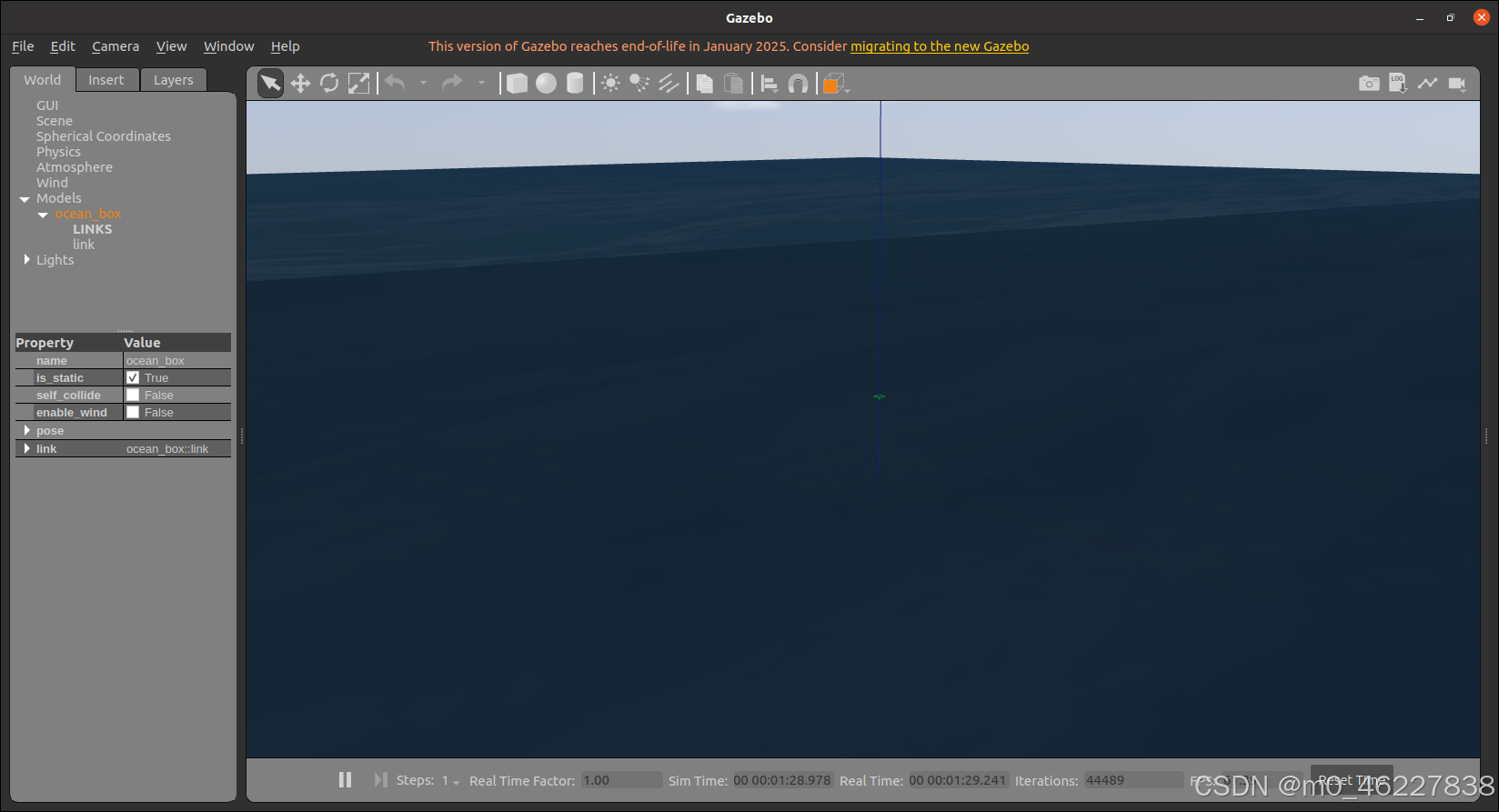
roslaunch uuv_gazebo_worlds empty_underwater_world.launch
成功进入水下世界!
总结
本文介绍了UUV Simulator的安装过程,这是进行水下世界仿真实验的基础。后续将围绕水下世界的仿真实验不断更新!